私、本業は企業の研究職です。社内では研究発表会のような会議が定期的に開かれています。
担当者の説明と質問応答を順に繰り返す形式で進められる会議で、学会と同じ形ですね。
今回、私がこの会議の進行係になったのですが、このタイムキーパー役って会議中はとってもつまんないんです。
タイムキーパーは発表の残り時間を発表者に知らせるため、予鈴を5分前に1回チン!、2分前に2回チンチン!とか鳴らすんです。
発表は最先端の研究なので面白い内容ですし、きちんと聞いて自分の仕事に役に立てたりしたいのですが、タイムキーパーになってしまうと時間が気になって議論に集中できないんで すよ。
そこで!
河西電子の技術を結集しタイムキーパー・ロボットを作ってみました!
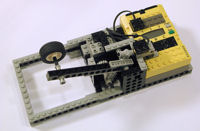
LEGOで(笑)。
休みの日にヒマだったのでビール飲みながらちょいちょいと作りました。
作り出すと、ちょうどいい大きさの音を出すためのハンマーの重さや速度、反復して鳴らすときの自然な時間間隔、それらに適したギア比とモーター出力など、結構奥が深い。
作ってはバラし、作ってはバラし・・・、なかなか納得いくモデルにたどりつけない。ああ、こんなに大変だとわかってたらやってなかっただろうな。
そもそも、パソコンソフトとして時間を計測しベル音を出力するソフトもいいのがあるのですが、ここはあえてアナログで行きます。
なぜなら、見た目が面白いから。理由はそれだけです(笑)。
結局1日半かかって安定に動作するものができました。
これがその動画。
これを実際に会議に持ち込んでみました。
これで会議に集中できるぞ!
と思ってたんですが、いざ会議を始めてみると、
・ちゃんと動いているんだろうか・・
・誤動作して全然関係ない時間で鳴らしてしまわないだろうか・・・
・おおっと、もし動作しなかったときのために自分でもちゃんと時間を計っておかないと・・・
もうロボットが気になって気になってしょうがない。
会議どころじゃない(笑)。
・・・しかし、結局心配は杞憂に終わり、ロボットは思い通りに定められた時間で「チン!」「チンチン!」と軽快なベル音を響かせていました。
40回ノーミス、完全に任せることができる信頼性。
こりゃ楽チンだ!
しかもベル係は、どうしても議論の妨げになりたくないという心理から、意図せずとも音の大きさや鳴らすタイミングを調節してしまうのですが、そこは客観的なロボットですから議論が佳境に入ってい
ようと、上司が良いことを言っていようと、かまわず「チンチン!」と鳴らしてくれます。結果、通常はどうしても遅れがちのタイムテーブルもきわめて順調にこなしていくことができました。
私も、心配してたのは初めだけで、あとはすっかり進行をロボットに任せディスカッションに加わることができ、挙句は自分のロボットに「チンチンチン!」と議論の収束を催促される始末でした。
暇つぶしに作ったロボットですが、思いのほか使えたなあ。
ちゃんとしたの作ろうかな・・・こういうのあったら欲しい人います?
Copyright(C)2002-2009 Kawaden Lab. All rights reserved.
|

