|
|
||||
さて、一世一代の衝動買いを果たしてしまった結果のロボットキット:YDH-PDSですが、とりあえず下半身だけ組みたててみました。電源を入れていない状態でいろいろ動かしてみると、非常に自然な動きをするのに驚かされます。さすが洗練された設計です。 前回、電源をいれて直立状態のポーズデータを作製するところまで行いました。YDHの下半身部分の可動軸は、模式的に書くとこんな感じになっています。
下の画像は左足首部分を後ろから見たところです。 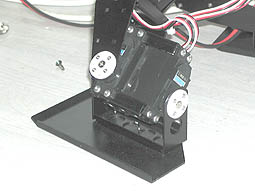 左側のサーボが足首を前後に傾けるピッチ軸、右側のサーボが左右に傾けるロール軸です。このようにサーボの位置を組み合わせることによって、軸を直交させています。軸を直交させることによって、幾何学的な計算の取り扱いが簡単になるそうです。 サーボをコントロールするマイコンは姫路ソフトワークス社のHSWB-02です。パソコン上のコントロール用ソフトからRS232C通信で制御することができます。  コントロールソフトです。円グラフのようなパネルを操作してサーボをダイレクトにコントロールすることができます。 コントロールソフトです。円グラフのようなパネルを操作してサーボをダイレクトにコントロールすることができます。各サーボの角度を調整し、のぞみのポーズを決定します。足先をそろえたりするためには1度きざみの微妙な角度調整が必要です。 電源を入れたら、くれぐれもロックには要注意!ヤバイかなと思ったらサーボ電源を即座に切断できるようにしておくといいと思います。 実験用電源は、ラジコンに使ってた安定化電源を使っています。  アルインコ社製DM330MVです(画像は2台です)。最大電流32Aとかなりの容量ですが、ロボットの姿勢によっては最大消費電流は10A以上にもなるようですから、このくらいあった方がいいかもしれません。 アルインコ社製DM330MVです(画像は2台です)。最大電流32Aとかなりの容量ですが、ロボットの姿勢によっては最大消費電流は10A以上にもなるようですから、このくらいあった方がいいかもしれません。はじめは1台でマイコンとサーボの共有電源としていたのですが、どうも激しい動きの際はマイコンが停止してしまうことが多かったので、もう1台ひっぱりだしてきて別電源としました。マイコンの方は明らかにオーバースペックですが・・。 電流計を見て、サーボにどのくらい負担がかかっているのかを推し量りつつ作業を進めます・・。 ポーズの作製中は、自力で立っていられない姿勢になるので、このように片手で支えながら進めていましたが、  これが結構重い!腕が疲れ、30分もちません・・・。片手ではキーボード操作もままならないし・・・。 そこで!! 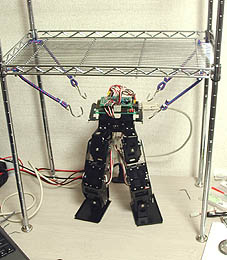 「基地」を作りました(笑)。 DIY店で買ってきたパイプ棚と自転車用荷台ゴムヒモ、洗濯用フックを組み合わせてみました。 余計な力をかけることなく、割と自由にポーズを試すことができるようになりました。 なんかロボットヒーローものっぽくもあり気にいってます(^^) 準備が整ったので、早速歩行モーション作製にとりかかりました。歩行に入る前のはじめのポーズを作製し、次に2番目のポーズ(たとえば右足を上げたかっこう)・・・・と、順次歩行に必要なポーズを全て作製します。その後、一定時間ごとにポーズを順番に再現、推移するプログラムを作製します。 ポーズはこんな感じで考えました。
1.~7.のポーズそれぞれの上の図は横から見たところ、下は前から見たところです。右足が灰色、左足は黒いほうです。 右足を1歩踏み出し、左足を上げるところまでの図です。これ以降は同様の繰り返しで連続歩行することができます。 まず、右足を上げるために左足に重心を移します(2.)。これにより右足を上げても重心が左足上(赤の破線)にあるため、安定して立っています。その後、右足を前に踏み出し(4.-5.)、続いて左足を上げるために重心を逆の右足に移します(6.)。あとは右足と同様に、前に踏み出して前進します。 動画はここ! 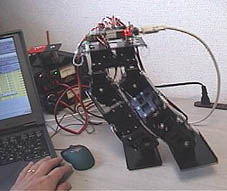 (wmv形式:286kB) ・・・・・・ ううむ・・・・・・・・・・ ・・・・・・・・・・・・・・・・ ・・・・・・・・・・・不自然だ・・・・。 不自然ですよねー。 しかし、ここまでの段階で「2足で前進する」という目的を達成しているので本来ならば満足するべきところなんです。これはなまじっかヒト型をしているがゆえに、人間の歩行形態に近づけたくなってしまうという、 ヒューマノイド・ロボットの罠 です(笑)。 どうでもいいことは置いといて、この「不自然さ」は、どうも今回作製した歩行方法は「静歩行」であることに原因があるみたいです。 ・静歩行:常に重心が左右どちらかの足の裏の上にあり、歩行中のどのポーズでも静止していられる。 ・動歩行:重心は足の裏にあるとは限らず、いわば常に倒れながら重心を移動させていく歩行 例えば下図はポーズ4.のところですが、  持ち上げた右足を前に振り出すところですが、そのまま振り出したB.では重心(b)が足の裏(a)から外れてしまうために、このままでは前方に転倒してしまいます。そこで、A.のように状態を後ろに反らせて、重心を足の裏の上にもってきているのです。 しかし、人間が歩く時はこんな風にはしません。むしろB.の方が自然です。そのようにして「前方に倒れながら歩く」のが動歩行です。 今回も少しB.の動歩行(モドキ)に挑戦してみたのですが、この時、右足は倒れながら接地する衝撃をうまく吸収しながら着地しなければなりません。これがポーズのプログラムのみではうまくいかず、転倒するばかりでした。 今後は動歩行に挑戦していきたいと思っています。 結論:静歩行達成! しかし苦労したわりにあまりうれしくないのはナゼ!? 2004/1/18更新 |