 ”ROBO-ONE Lab.”2足歩行ロボット組み立て講座に参加 (2003/11/2-3)
”ROBO-ONE Lab.”2足歩行ロボット組み立て講座に参加 (2003/11/2-3)
ひょんなきっかけから、先日、2足歩行ロボットに触れる機会がありました。イクスリサーチ社主催の2足歩行ロボット組みたて講座です。
 2足歩行ロボットは、人間のように2本脚でバランスを取りながら歩行移動のできるロボットです。
2足歩行ロボットは、人間のように2本脚でバランスを取りながら歩行移動のできるロボットです。
階段や机などを主体にした人間の生活の場に入って活動できるロボットは、人間と同じく2足歩行可能であることが必要である、という考え方に基づき、特に日本において最先端の研究が進んでいます。
HONDAのASIMOが有名ですよね。
近年、電子工作素材の機能が向上したこともあり、アマチュアレベルでも2足歩行ロボットの研究が進んでいます。その中でも「ROBO-ONE」は、ロボットの研究や技術情報の交換を主体にしつつ、エンターテイメント性を重視した、ロボットの対戦トーナメントです。
・・・・という世界があることを、私は最近まで知りませんでした。
今回の講座に参加というお話をいただいたので、ちょっと調べてみて
「へぇ~こんな世界もあるんだ~」
という、まあ他人事レベルの関心度だったのでした。
まあ暇だしチョットのぞいてみるか・・・・という感じです。
 会場は東京・台場にある日本科学未来館です。2日間に渡って開催されました。おお、お台場だ・・はじめて来た・・。
会場は東京・台場にある日本科学未来館です。2日間に渡って開催されました。おお、お台場だ・・はじめて来た・・。
 講座は2日間かけ、ロボットの組みたて、CADの使い方、ロボットの動きのプログラミング、と進みました。最後には各チームごとで自由にモーションを作製しデモンストレーション大会を行う予定です。
講座は2日間かけ、ロボットの組みたて、CADの使い方、ロボットの動きのプログラミング、と進みました。最後には各チームごとで自由にモーションを作製しデモンストレーション大会を行う予定です。
 製作風景です。キットはイトーレイネツ社ロボットキットの下半身部分です。サーボモーターが12個もついているので、間違えないように配線するのが大変でした。
製作風景です。キットはイトーレイネツ社ロボットキットの下半身部分です。サーボモーターが12個もついているので、間違えないように配線するのが大変でした。
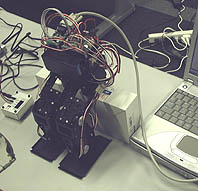 ハードは完成。モーションをプログラミングしているところです・・。
ハードは完成。モーションをプログラミングしているところです・・。
電源が入っていないとサーボは「力が抜けた」状態になっているのでこのようにイスに腰掛けさせておきます。イスに座るという行為は、人間にとっても力のいらない、楽な姿勢であるということがわかります。
 全身モデルです。向かって右が今回のキット:YDH、左はイクスリサーチ社のROBO-ONE用モデルです。なんとベルトドライブによる軸の直交化を実現しています。カッチョエエ~!
全身モデルです。向かって右が今回のキット:YDH、左はイクスリサーチ社のROBO-ONE用モデルです。なんとベルトドライブによる軸の直交化を実現しています。カッチョエエ~!
最後に、各チームで好きな動作をプログラミングし、デモンストレーションを行うパフォーマンス大会が行われました。モーション作製時間が短かったのですが、歩行、片足立ち、空手の型などすばらしいパフォーマンスが繰りひろげられました。
我が「K-LAB」チームはといえば・・・、あまり考えずに作った簡単なモーションがなぜかウケてしまい、思いもよらず優勝してしまいました。どひゃひゃ!
ロボコンマガジンの取材レポートはこちら・・
いや~楽しかったです。2足歩行ロボットという分野はやはり「マニアック」です。しかし、スタッフをはじめみなさんとても明るい雰囲気で、2日間をとても楽しく過ごすことができました。同時に、なにかこう、未来に向けた情熱のようなものも、会場の雰囲気からひしひしと伝わってきました。
結論:
何だか楽しそうだぞ2足歩行ロボット。
・・・禁断の世界に足を踏み入れてしまったか!?
