 ロボットキット:YDH-PDS入手 (2003/12)
ロボットキット:YDH-PDS入手 (2003/12)
先月ひょんなきっかけで2足歩行ロボット講習会、”ROBO-ONE Lab.”に参加しました。
これは、ある高専の先生が研究のために参加されるというので、まあ暇つぶしにでも、程度の気持ちでついていったものです。
 講習ではロボットキットを教材として組み立てながら進行しました。2日間で下半身のキットを作動させるところまで完了します。
講習ではロボットキットを教材として組み立てながら進行しました。2日間で下半身のキットを作動させるところまで完了します。
が、どうやらキットが発売されるようになったのはごく最近の話で、ロボットの製作といえば普通は一からフルスクラッチするのが常識という世界らしいです・・・。
その場合の一連の流れも講習の中で紹介されていました。
・3D-CAD(結構本格的、というかプロ仕様)による設計
・部品の製作。板金技術など
・アクチュエータコントロール用のマイコン設計
・コントロールソフト作製 などなど・・・
・・・・想像を絶する手間の作業です。
サーボを20も30もつかうような複雑なメカを、アルミ板からはじめて全て自作するという、考えただけで気が遠くなるようなプロセスです。
苦労して完成した2足歩行ロボットはROBO-ONEという2足歩行ロボットのコンテストに出場し、
片足立ち とか
逆立ち とか
ちゃぶ台をひっくり返す
などのデモンストレーションで会場の笑い、いやいや感動を誘います。
・・・・・・・・・・・・・・・・・
・・・メチャメチャ楽しそうじゃーん!(笑)
こんな世界があったとは・・・と、すっかりその魅力にとりつかれてしまいました。
きっかけは暇つぶしだったのに・・。
が、冷静に考えてみればメカ、回路、ソフト全ての技術が要求されるこの分野、いずれの専門知識や技術も持ち合わせない私にはとうてい無理ではないのかと思えます。ううむ・・・悩みます・・・。
結局、

ああ、買ってもうた!
講習で使用したのと同型機、YDH-PDSです。ただしマイコンは姫路ソフトワークス社製のHSWB-02です。もう後ろへは引けません。
早速組みたてだっ!!

さすがプロの作ったキットです。精度よくサクサク組み上げることができます。
とりあえず下半身が完成!!
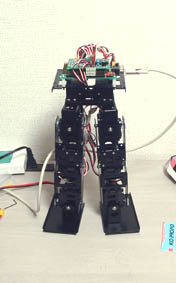
ニュートラル位置調整には苦労しましたが、とりあえず自立できました!
本日のメモ
・キットはツクモロボット王国で購入。資金は祖父の遺産。じいちゃんごめん。
・ROBO-ONEはロボットの基礎能力もさることながら独創性を重視するため、このような市販キットそのものでは参加資格を得られない
・試運転で最も注意すべきことは、”サーボのロック”。メカ的に干渉しているためにサーボが目標とする角度に到達できない場合に(例えばモモとスネのパーツが当たっているためにそれ以上ひざは曲がらない、という状況)、大電流が継続してサーボモーターに流れ、短時間で焼き付いてしまう。1万円のサーボが一瞬で昇天・・・。
・サーボ軸のホーン反対側はベアリングで保持されているが、作動中に軸穴から外れやすい構造になっているのでネジロック剤で固定すると、いいかんじ~、に、なります。
結論:
自作ロボットでちゃぶ台をひっくり返してみたい!
