初走行の時、実はお気楽レヴロガー1号を積んでいたのですが、反射式のセンサーはやはり調整に手間がかかるため、この時も結局データが取れませんでした。これまでは実験的な意味あいが大きかったので、まあ調子がいい時に一回でもデータがとれればいいや・・と思っていたのですが、今回はレース会場でのデモンストレーションに使うそうなので「すんまそん、今日ちょっと調子わるいっす」ではすまされません。むうぅ。
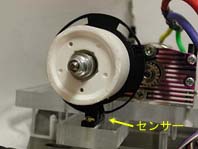 そこで透過式の赤外線センサーを採用しました。これは駆動回転部分に円形の板を取りつけ、これがセンサーの赤外線をさえぎったり、穴の部分で通過させることで回転速度に比例してセンサーのON-OFFサイクルを繰り返す・・・というしくみです。赤外線が直接センサーに入ってくるので高感度で周りの条件にも左右されにくいと思われます。
そこで透過式の赤外線センサーを採用しました。これは駆動回転部分に円形の板を取りつけ、これがセンサーの赤外線をさえぎったり、穴の部分で通過させることで回転速度に比例してセンサーのON-OFFサイクルを繰り返す・・・というしくみです。赤外線が直接センサーに入ってくるので高感度で周りの条件にも左右されにくいと思われます。
センサーはRSコンポーネンツ(株)から入手しました。センサー内部になんとかトリガだの増幅なんとかだのが入っていて、直接PICに接続できるようです。よくわからないんですが実際にテストしてみると、こりゃいい!!データの鳥煮餓死、あれ?取り逃がしもなく百発百中です。大成功!!
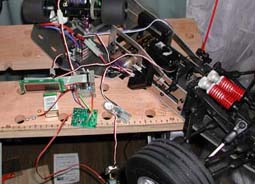
 デバグにはさんざん苦労しましたが、どうやらでけた!!まだ有線の状態ですが、サーボの動きは本来のプロポシステムと比べても全く遜色ありませんでした。
デバグにはさんざん苦労しましたが、どうやらでけた!!まだ有線の状態ですが、サーボの動きは本来のプロポシステムと比べても全く遜色ありませんでした。